近日,我校机器人学院周易教授团队(NAIL)与香港科技大学郑家纯机器人研究所沈劭劼教授团队(ARG)在高速自主移动机器人关键技术方面取得了突破性进展,联合研究的成果Event-based Visual-Inertial Velometer被Robotics: Science and Systems (RSS) 2024录取。
机器人状态估计旨在获取机器人自身运动状态(包括位置、姿态、速度、加速度等),是自主移动机器人领域中重要的基础研究问题。通常的解决方案以传统帧相机作为主要传感器,部分方案还搭配使用了惯性测量单元(IMU)和其他一些外感受传感器,例如激光雷达(LIDAR)、毫米波雷达(RADAR)等。然而,基于上述传感器组合的解决方案在处理涉及高速运动的状态估计任务时面临失效的风险,其主要瓶颈源于传统帧相机的工作原理,即高速运动造成的成像模糊给状态估计任务中的特征提取与数据关联带来了的严峻挑战。
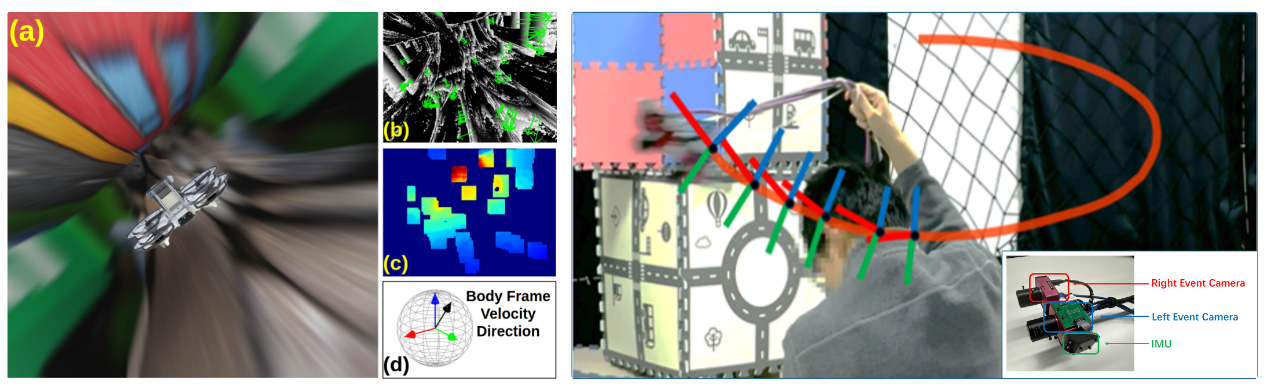
湖南大学机器人学院周易教授团队与香港科技大学郑家纯机器人研究所沈劭劼教授团队展开合作,深入调研了近些年出现的类神经形态事件相机(Neuromorphic Event-based Camera)。该传感器模仿人类视觉神经通路的工作机制,具有异步、快速低延迟、高动态响应和低能耗等优良特性。同时,它具备超高的时间分辨率,能够感受并输出百万分之一秒级别的亮度变化信息。然而,如何利用该传感器的特性解决状态估计的关键技术难题,同时充分释放其高速特性,依然是一个开放性的研究问题,充满了理论和工程实现的挑战。
该工作的共同第一作者分别是香港科技大学博士研究生Xiuyuan Lu和湖南大学机器人学院周易教授。两个研究单位之间长期保持紧密的合作关系,Xiuyuan Lu目前作为访问生(visiting PhD student)在周易教授团队开展科研工作。
Robotics: Science and Systems (RSS)会议素有世界机器人技术精英俱乐部之称。该会议重点关注机器人技术与科学的交叉领域,涵盖机器人设计、感知、规划、控制等广泛主题,以展示前沿研究成果(年收录工作≈100篇)、吸引机器人界顶尖研究人员而闻名。第20届RSS会议将于2024年7月15日至19日在荷兰代尔夫特理工大学举行。
该工作得到了来自国家自然科学基金、国家重点研发重点专项青年科学家项目的资助。
论文链接:https://arxiv.org/abs/2311.18189
来源:机器人学院
通讯员:江颖
责任编辑:文亦佳




 【组图】2024年研究生师生篮球联赛、啦啦操比赛举行
【组图】2024年研究生师生篮球联赛、啦啦操比赛举行
 【组图】湖南大学2024级新生报到
【组图】湖南大学2024级新生报到
 【组图】毕业快乐,前“图”似锦
【组图】毕业快乐,前“图”似锦